数字图像处理
Github 的 README.md 并不支持公式的渲染,所以部分原理讲解的东西移到这个篇章的博客中。
本篇包含:
- 骨架提取
- 霍夫变换
- Canny 边缘检测
- Metric Rectification
Skeleton
前一段时间在看折痕消除的一篇论文的时候提到了提取文字的骨架,就重新复习一下《数字图像处理》这本书中关于骨架的知识。
集合 $A$ 的骨架的 $S(A)$ 概念上很简单:
若 $z$ 是 $S(A)$ 的一点,$D_z$ 是 $A$ 内以 $z$ 为圆心的最大圆盘,则不存在包含 $D_z$ 且位于 $A$ 内的更大圆盘,满足这些条件的圆盘 $D_z$ 称为最大圆盘
若 $D_z$ 是一个最大圆盘,则它在两个或多个不同的位置与 $A$ 的边界接触。
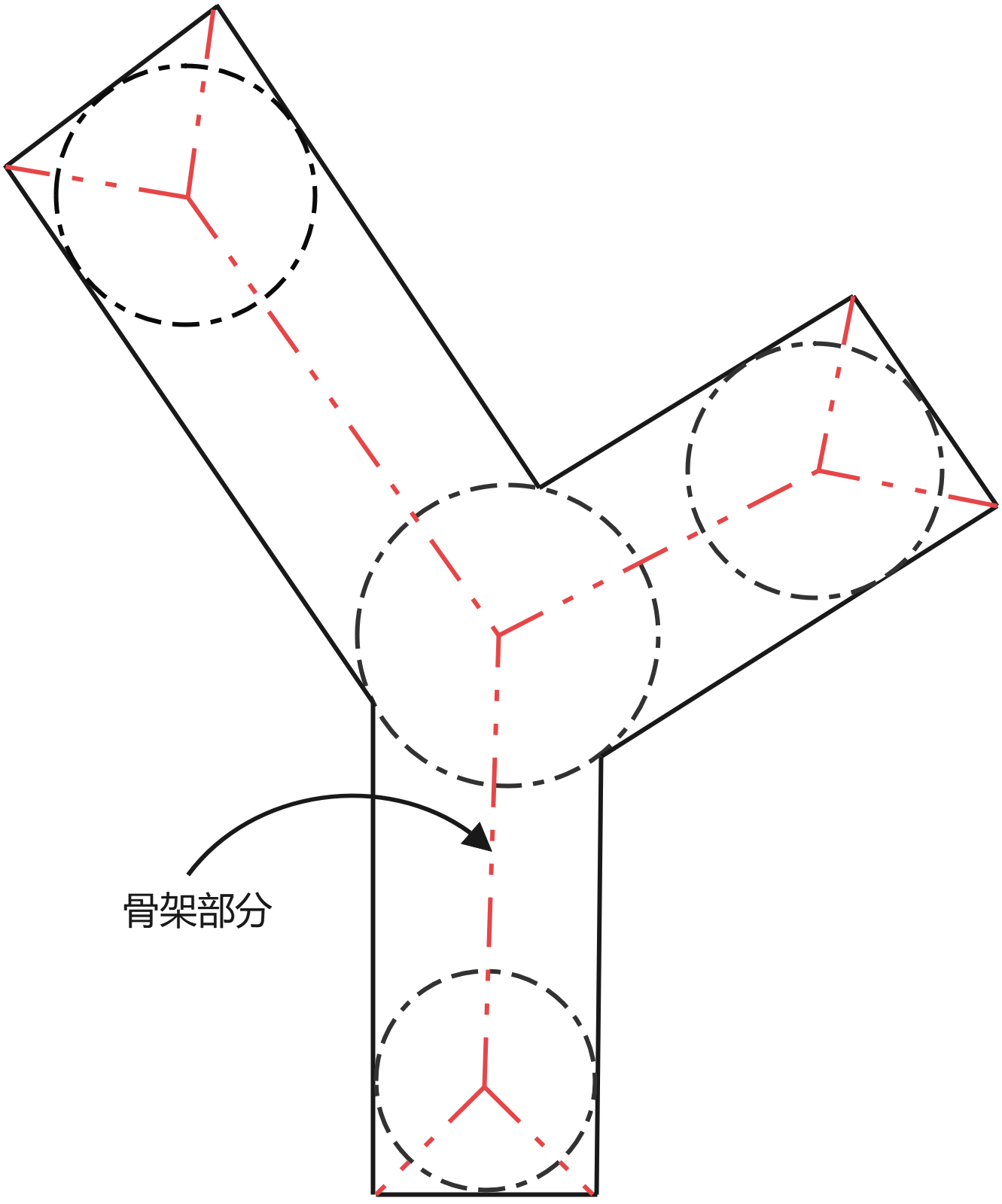
$A$ 的骨架可以用腐蚀和开运算来表示:
式中,$B$ 是一个结构元,$A\ominus kB$ 表示 $A$ 的连续 $k$ 次腐蚀,同时,$K$ 是 $A$ 被腐蚀为一个空集前的最后一个迭代步骤:
Canny
只使用梯度做边缘检测的一个很大的问题是:对噪声过于敏感,所以提出了 Canny 边缘检测算子。
Canny 算法基于以下三个目标:
- 低错误率:所有边缘都应该被找到,并且不应有虚假响应。
- 边缘点应该被很好的定位:已定位的边缘必须尽可能接近真实边缘,也就是说,由检测子标记为边缘的一点和真实边缘的中心之间的距离应最小。
- 单个边缘点响应:对于每个真实的边缘点,监测子应该只返回一个点,也就是说,真实边缘周围的局部最大数应该是最小的,这意味着检测子不应识别只存在单个边缘的多个边缘像素。
与之对应的,Canny 边缘检测包含 5 个步骤:
- 平滑(Suppress noise)
- 梯度计算(Compute gradient magnitude and direction)
- 非最大值抑制(Apply non-maximum suppression)
- 滞后阈值法/双阈值法(Hysteresis thresholding/Double thresholding)
- 连通性分析(Connectivity analysis to detect edges)
首先采用高斯模糊来平滑图像。令 $f(x, y)$ 表示输入图像,并令 $G(x, y)$ 表示高斯函数:
用 G 和 f 的卷积得到平滑后的图像 $f_s(x, y)$
在这之后计算梯度幅度和方向:
由于梯度图像通常在局部极大值附近包含一些宽脊,下一步非极大值抑制就是细化这些宽脊。
我们首先将所有可能的边缘方向量化为 4 个方向范围,如 0,45,90,135 如果该点处梯度的幅值小于该方向上的相邻两个点(在该点两侧),则抑制(赋值为 0),否则不变。
得到的图像 $g_N(x,y)$ 是只包含细化边缘的结果,然后我们对 $g_N(x,y)$ 进行阈值处理,以减少假边缘点。 Canny 算法使用滞后阈值处理,一个高阈值 $T_H$ 和一个低阈值 $T_L$。高低阈值的比率应该在 2 到 3 之间。
阈值运算可以看做创建了两个新的图像 $g_{NH}$ 和 $g_{NL}$
这两个分别代表“强”边缘像素和“弱”边缘像素,所有的强边界像素均被假设为有效的边缘像素,并被立即标记,如果弱边缘的像素连接到了强边缘(8邻域),则这些弱边缘也被认为是图像的边界,所以最后一步就是用BFS 判断一遍弱边缘是不是连接到了强边缘,如果连接到了,该点也可以认为是强边缘,就从该点继续向 8 邻域搜索。
Hough Transform
已知一副图像中的 n 个点,假设我们希望找到这些点中位于直线上的子集,一种可能的解决方法是。首先找到由每对点确定的直线,然后寻找特定直线的哪些点的所有子集。这种方法涉及寻找 $\frac{n(n-1)}{2}\sim n^2$ 条直线,然后将每个直线执行 $n*\frac{n(n-1)}{2}\sim n^3$ 次比较,计算困难。
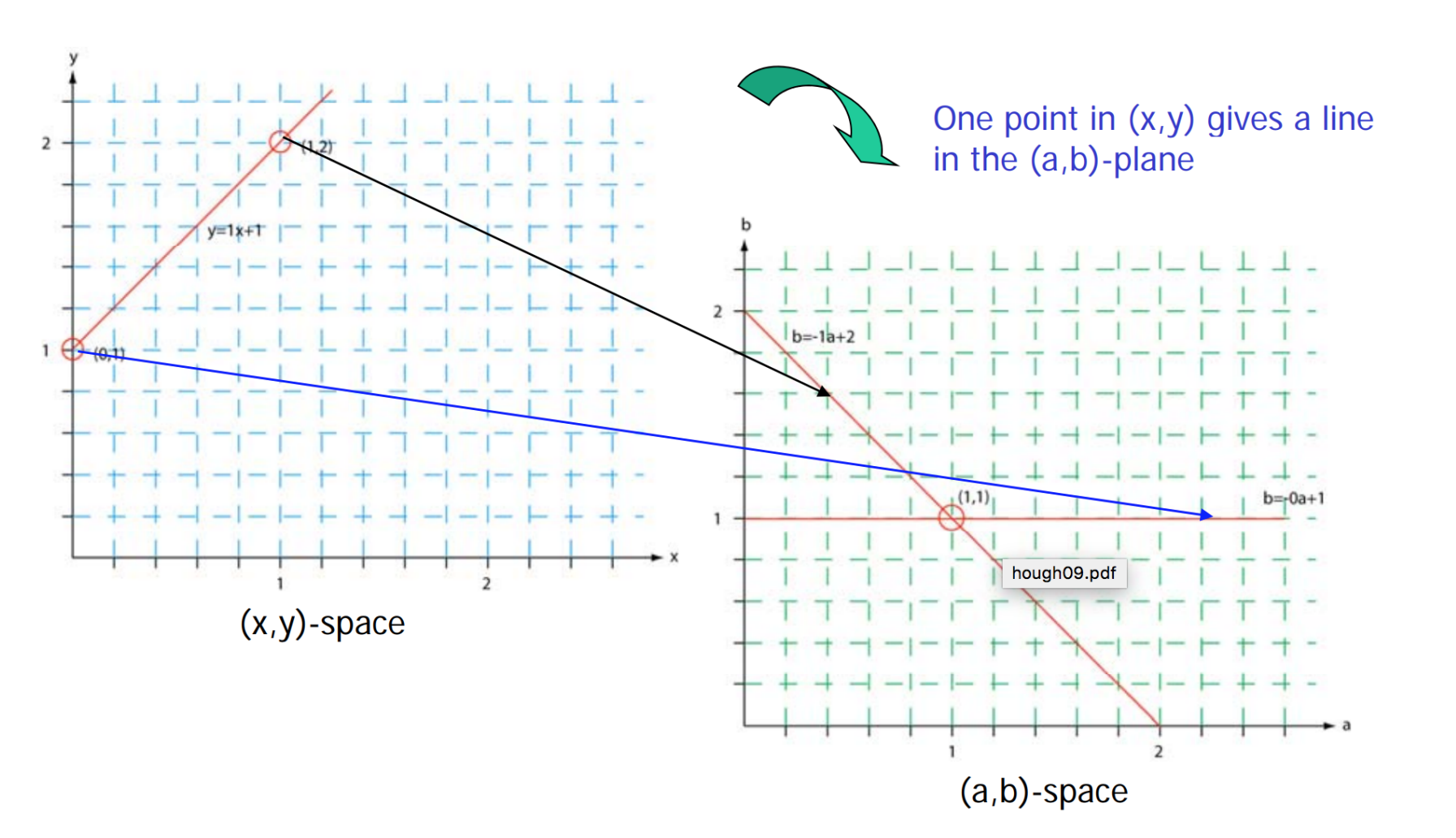
Hough 提出了一种方法,通常称为霍夫变换。令 $(x_i, y_i)$ 表示 $xy$ 平面上的一点。并考虑一条直线的斜截式:
满足过点 $(x_i, y_i)$ 的直线有无数条,此时我们考虑 $ab$ 平面,并将直线改写成为:
在该空间下,通过原直线的两个点 $(x_i, y_i), (x_j, y_j)$ 一定在某个点相交,这个点就是直线的斜率和截距。事实上,直线上的所有的点在该平面上都相交于一个点。
为了解决直线斜率无穷大的问题,我们用另外一种直线的标准式:
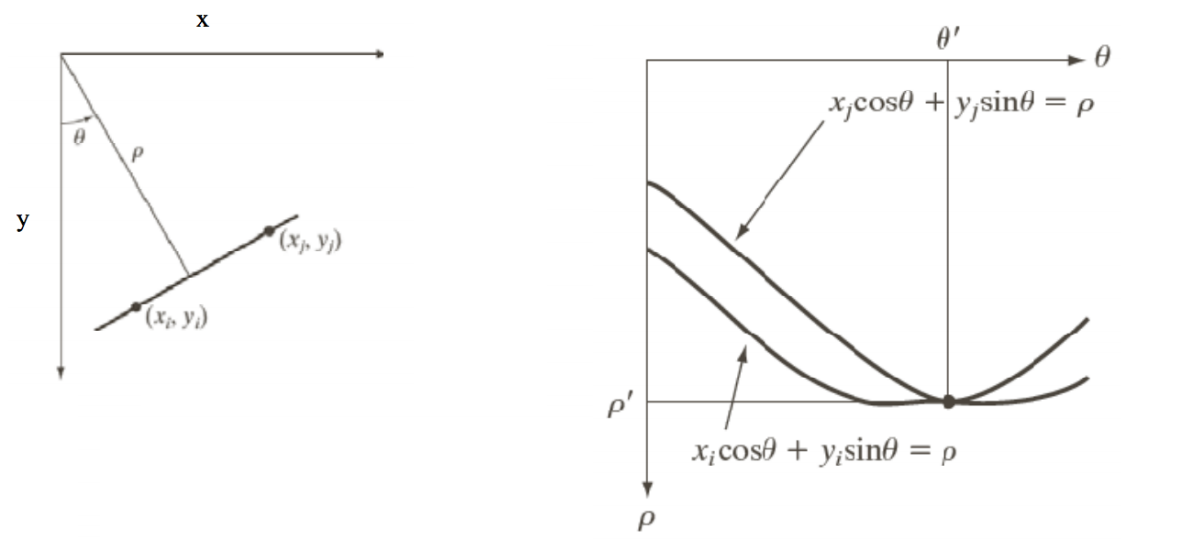
在具体的算法计算上,霍夫变换首先将参数空间划分为多个累加单元。假设其中$(\rho_{min}, \rho_{max})$ 和 $(\theta_{min}, \theta_{max})$ 是期望的参数值范围。坐标 $(i, j)$ 处具有累加值 $A(i,j)$ 的单元对应参数空间 $(\rho_i, \theta_j)$ 的方格。最初,这些单元格被设置为 0,对 $xy$ 平面的非背景点 $(x_k, y_k)$,对于所有可以取的 $\theta$,求得 $\rho$,将该值四舍五入到 $\rho$ 轴上最接近的单元格,若选择一个 $\theta_q$ 的值解得 $\rho_p$,则令:
最后,当 $A(i, j)$ 大于一个特定的值时,认为存在一条对应的直线。
Metric Rectification
我们需要首先知道 3D 视觉中常见的几种变换
- 相似性(similarity)变换:由各向同性缩放组成的等距映射
也可以写作矩阵块的形式如:
- 仿射变换(affine)变换:保持二维图形的“平直性”,即变换后直线还是直线不会打弯,圆弧还是圆弧和“平行性”,平行线还是平行线,相交直线的交角不变。
其中 $A$ 是 2×2 的非奇异矩阵。平面仿射变换有6个自由度,对应6个矩阵元素。而它总可以分解为:
其中 $R(\theta)$ 和 $R(\phi)$ 是两个旋转角度,D 是对角矩阵
该分解可以通过 SVD 分解实现。
- 单应性 (homography) 变换:也叫投影变换
其中 $v=(v_1,v_2)^T$。
投影和仿射变换之间的主要区别在于,对于投影变换,向量 $v$ 不为 null,这是投影变换非线性的原因。
比较理想点 $(x_1,x_2,0)^T$ 在仿射和投影变换下的不同:
仿射变换:
投影变换
在仿射变化中,理想点保持理想状态(即无穷大)。 在投影变换中,它映射到一个有限点。
要完成图像的度量矫正,我们需要两点:消除投影变换和仿射变换带来的变化
遵循下面的步骤:
- 寻找在图像平面中的平行的点来确定无穷远处的直线表达式。
- 由于该线在原本的 3D 坐标系中的无穷远位置移动到了一个有限的位置,我们首先就需要将其回归到无穷远处,即寻找一个变换 $H_p$ 将 $l = (l_1, l_2, l_3)^T$ 变换到 $(0, 0, 1)^T$
我们一般选择
- 对于图像的每一点应用该变换即可
这时图像中平行的线就会平行了,下一步需要矫正角度让垂直的线也能垂直。
- 首先先选择好在原始场景中互相垂直的线的端点,在图像中选择这些点构成了新的线和新的夹角。
我们需要计算 $C^{*}_{\infty}$。对于每一组垂直的线,我们有约束,这些约束构成了一个可以解的方程组:
- 根据奇异值分解计算可得变换矩阵,对于上一步变换完的结果再乘上该矩阵即可。
详细过程参考 Learn-DIP 中的代码。