双线性插值
最近复现论文的时候,遇到了一个实现细节的问题:双线性插值技术(bilinear interpolation)
简单来说,插值指利用已知的点来“猜”未知的点的属性值,图像领域插值常用在修改图像尺寸的过程,当然我遇到的这个问题不是简单的调个函数就能解决了的,我需要在一个凸四边形中用四个顶点来表示中心点,在中心点的坐标已知的情况下。
双线性插值
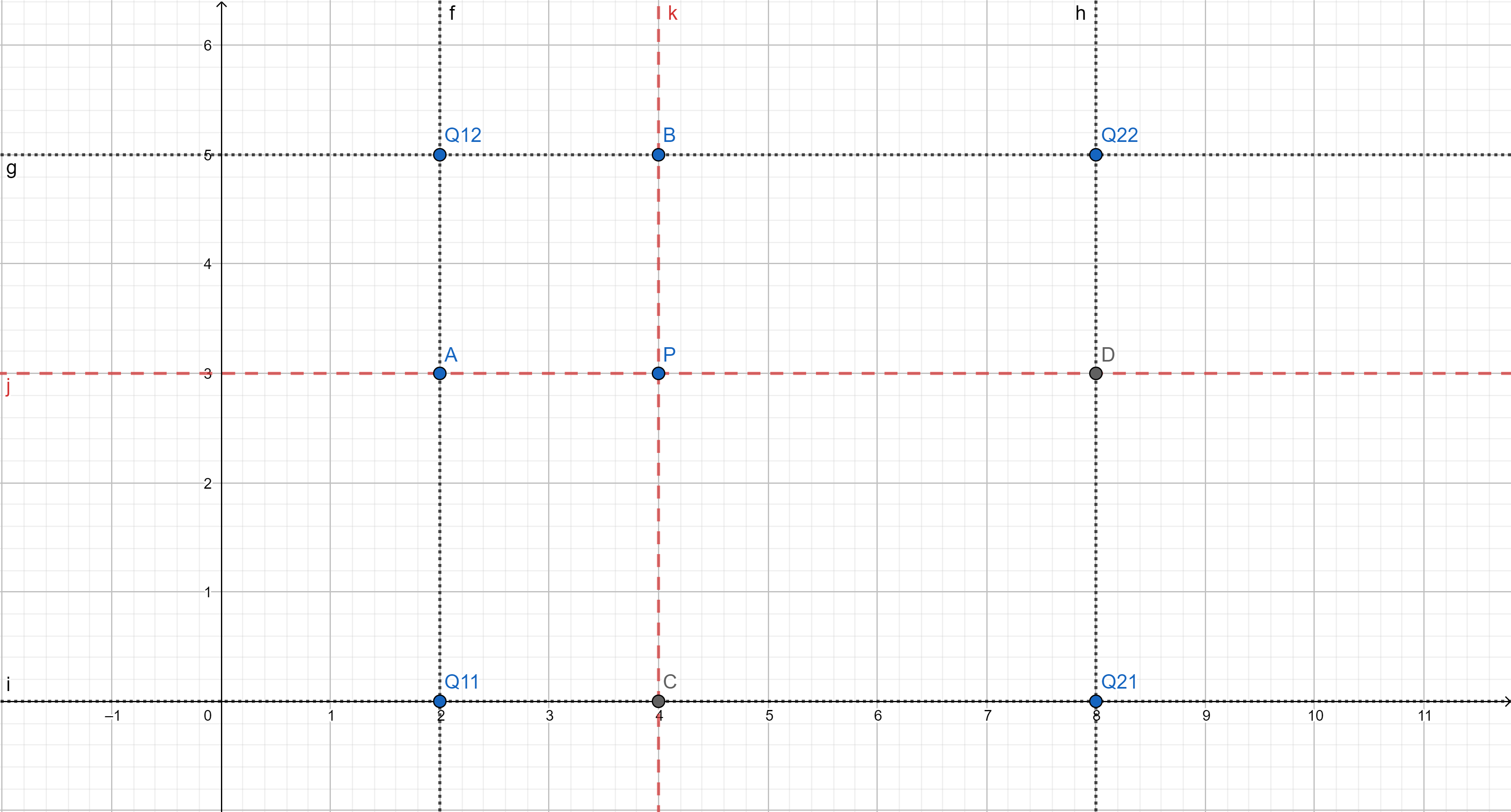
双线性插值运用在图像上,就是用原图像的四个点计算新图像的一个点,这个我们已经很熟悉了:
很容易能够推导:
如果已知 要求
的坐标,我们很容易可以通过等比例的公式得出
对于 P 在 y 方向上做线性插值,有:
将第一步的结果代入第二步,得到结果:
对于图片的双线性插值,四个点的选择必然是相邻的,即
简化的形式如下:
数学推广
继续深入,双线性插值本质是个数学的问题,它可以被应用在图像大小变化等一些场合中。
In mathematics, bilinear interpolation is an extension of linear interpolation for interpolating functions of two variables (e.g. x and y) on a rectilinear 2D grid
我遇到的就是这样的一个问题是,我的四个点并非是矩形,而且我希望可以用一种方法来让这四个点近似表示 P 点。
简单来说:
对于非对齐的输入点的双线性插值(Bilinear interpolation with non-aligned input points)
我们的外部不再是一个矩形了,我们定义 ,这时我们应该怎样用双线性插值的方法表示 P?
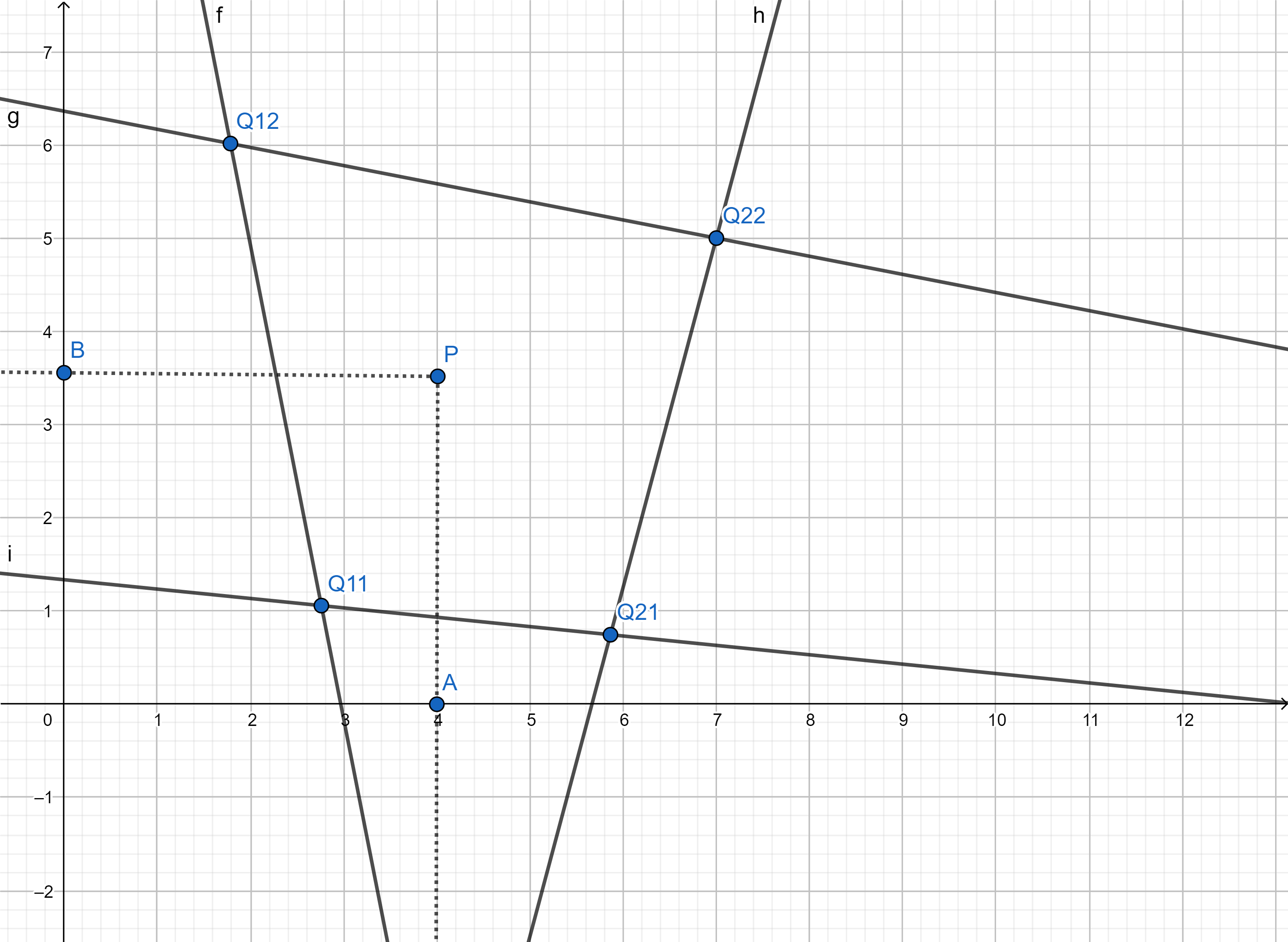
为了方便求解,我们转化一下,我们用这种方法来近似表示 P 点,t 和 s 是插值的系数,他们都是处于 0 和 1 之间的数,代表一个相对的权重系数。这样, P 可以用 s 和 t 来表示:
化简一下就得到了最终的表达式:
怎么解这样的一个方程,当然可以用牛顿法等一些近似数值解的算法,但解析解也是可以找到了!
我们首先先展开上面的式子,它对于 x 和 y 有相似的表示:
根据这两个等式,可以解出来 t
上面两个式子应该相等,这样我们就能联立得到一个伯恩斯坦形式的二次方程(Bernstein polynomial),他有更加优美并且数值上稳定的解,当然用一般二次方程的解也是没有问题的:
A, B, C 代表常数系数,最终的解为:
我们需要的 s 应该在 0 和 1 之间,往往得到的两个解会舍弃其中的一个。
- 当
时,对应线性的情况,此时
而
的情况理论上不会发生。
当时矩形的时候
最后一步就是带回 s 求解 t,选择前面的两个式子中的任意一个均可以。
这样就确定了解,就像论坛里说的一样 You can bilinearly interpolate in any convex tetragon. 它其实并不像想象中的那么复杂,就是简单的求解一个交点的问题。
逆双线性插值
我还见到一种方法叫做逆双线性插值(inverse bilinear interpolation),引用文章里面的图来说明计算过程:
(其实和前面的基本思路是一样的,只是名字或者看上去不太一样)
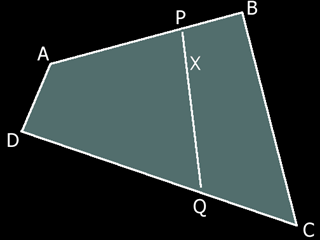
- 我们将 P 看做是 A, B 的按照系数 u 线性插值的位置点
- 我们将 Q 看做是同样系数的线性插值的位置点
- X 是 P 和 Q 的线性插值
这样 X 就可以用 u 和 v 来表示:
X 已知,我们需要多个方程才能解出来 u 和 v,而恰好,上面的式子,在 2 维空间下就有 x 和 y 两个式子,所以肯定有解。
定义下面几个临时变量:
简化后的等式:
对于任意两个象限 i,j(i, j 可以是 {x, y}, {y, z} …),以 x, y为例
解得
带回,有:
是不是觉得这个式子很熟悉,就是前面的,不过他转换成了一般二次方程的形式,一些小细节的地方也不太一样。主要是它可以完美的扩展到高维情况(虽然我暂时想不到高维的时候有啥用)
文章最后给出的伪代码:
1 | float cross( in vec2 a, in vec2 b ) { return a.x*b.y - a.y*b.x; } |
代码
我在想要怎样才能让这个方法独立于不同的数据结构(Eigen 或者 OpenCV 的 Vec,原生的 Point 类型),写一个好的模板函数出来。
1 |