aix
偏微分方程
学的时候记得笔记都是英语的加上又懒得翻译就只好拖到了现在
General
- 偏微分方程(PDE, partial differential equation)的解是一个关于时间和空间的方程
,我们用 u 代表在特定时间和空间的函数值。
- 在常微分方程的数值解中,我们是通过将 0-T 划分为若干个
,通过计算每个
。在偏微分方程中,我们构造下面的图形(mesh)来辅助我们的计算:
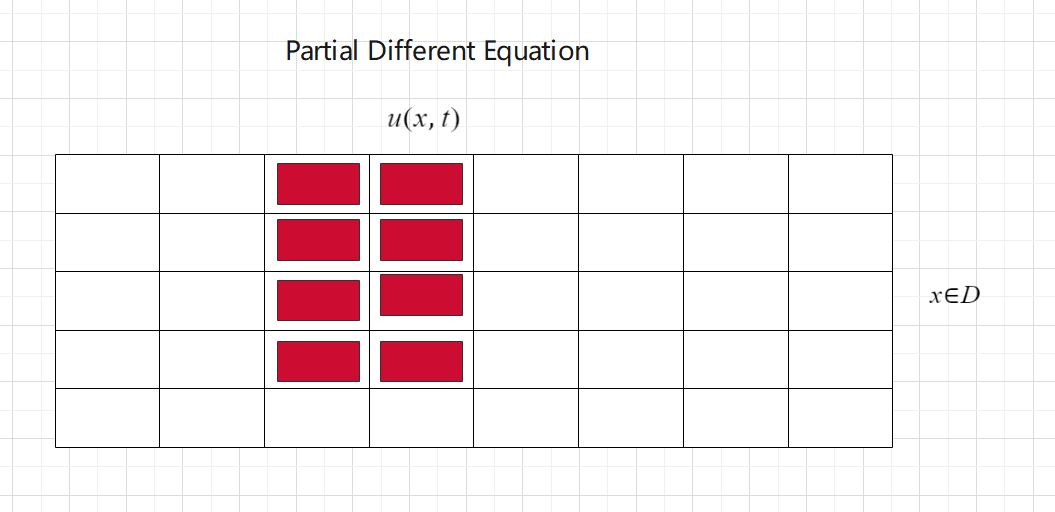
我们用 mesh 网格图上的 u 值来近似计算偏微分的值,我们观察临近的矩形,他们构成偏导的近似值。这样我们将偏微分方程的空间离散化,转换为常微分方程的系统。
空间离散化的方案(spatial discretization schemes)有:
- 有限元法(Finite Element Methods)
- 有限差分法(Finite Difference Methods)
- 有限体积法(Finite Volume Methods)
Finite Difference Formulas
我们以一个简单的偏微分方程为例:
k 代表导热系数。
假设网格在空间上的距离为 h,那么我们有:
- 一阶偏导的前向差分(Forward difference for first spatial derivative)
- 一阶偏导的向后差分(Backward difference for first spatial derivative)
- 一阶偏导的中心差分(Central difference for first spatial derivative)
- 二阶偏导的中心差分(Central difference for second spatial derivative)
Discretization Stencil
- 我们在网格来近似计算空间函数
stencil,如果用空间内更多更远的点来近似一个点的偏导值,那么一般情况下误差就会变的更小。但对于有些情况却不同,补充的来说,用更多的点近似来减少误差只对光滑的函数有效,对于那些不连续的函数,相邻点之间的关系很小,使用太多的点反而会影响准确度。 - 我们用
stencils size来描述有多少个点被用于近似偏导值。我们的误差和使用的近似方法的阶数成正比关系。我们假设误差为 e,h 为 网格缩小比例,q 是使用方法的阶数,我们有这样的关系: - 需要注意:减小空间网格的大小的同时也要减小每一步的时间
Solving PDE
- 解决 PDE 问题就是解决一个初始边界值问题(initial boundary value problem):
我们仍以热传导方程为例。在网格内部的点上,我们可以将求偏导转换为计算一组离散化的点,运用我们上面的二阶中心差分的近似计算:
我们想象 i 从 0 到 N-1,总共有 N-1 个类似上面的式子,即我们把 t 时间的 x 范围划分为 N-1 块,每一块都可以通过它临近的点来计算。下面把这 N-1 个式子合成在一起:
这样上面的方程就可以写成类似下面的形式:
f包含边界条件的信息。A 是一个 的系数矩阵,当x=1和x=N-1的时候都无法计算,所以设置行列式为全 0,需要 f 来辅助确定值以保证边界条件:
这样我们就可以用 ODE 的方法来解决 PDE 问题,比如说我们运用前向欧拉法:
We discretize the spatial domain into N spaces with N+1 grid points. How many unknown variables are evolved in the resulting system of ODEs?
答案是 N-1, 和
都是边界点(已知),这样在网格的内部就只有 N-1 个未知的点。
下面我们考虑计算的误差:PDE 方程的解的精确度分为空间和时间上的。我们取 e 代表误差,$\Delta t $ 代表每一步选择迭代的时间差(time_step),h 代表相邻 x 之间的距离,也可以看做网格大小(mesh_size),那么有关系:。其中 p 和 q 分别是我们选择的 ODE 方法的阶数和偏导数值解方法的阶数。如我们选择 FE (forward eluer) + 中心差分(Central Difference),那么 p 值为 1,q 值为 2。因为它们分别是 1 阶和 2 阶精确度的方法。如果 h 减小一半,那么误差就会变为四分之一。
需要注意,我们前面也提到了,一个小的 h 需要同时一个更小的 ,否则求解将会变得不再稳定。怎么理解呢,我们仍用热传导方程来理解:当我们观察更小的一段的变化的时候,不同段直接的交互会更加的频繁,我们需要用更小的时间来确保可以更加精确的捕获这些变化。
Boundary Conditions
- Dirichlet conditions
Dirichlet conditions fix the value of the solution u(x,t) at the boundary. This is like pinning the solution to a certain value at the boundary.
即在边界指定函数的分布形式
- Neumann conditions
Neumann conditions fix the value, not of the solution, but of its spatial derivative
at the boundary. This is like fixing the stresses at the boundary.
在边界指定外法线方向上的导数的数值
- Robin conditions
Robin conditions fix the value of a linear combination of the solution itself and its partial derivative at the boundary.
可以看做是第1和2条件的组合,要求偏导和函数本身的数值。
Linear System
对于转换为 ODE 的 PDE 问题,我们也可以用一些隐式的方法求解,如隐式欧拉法
求解这个方法,移项:
它的每一步相当于求解一个线性系统(linear system)(这不就是线性方程组吗),
这么做的好处在于,这样让我们可以使用更大的 相比较于显式方法(隐式方法的稳定性,参考 ODE 那节)
求解线性系统有很多的现成方法:
- A 是一般矩阵(general):高斯消元(Gaussian elimination),
- A 是三角矩阵(triangular):Forward substitution/backward substitution,
- A 是三对角线矩阵(tri-diagonal):托马斯算法(Thomas algorithm),
Iterative Algorithms for Linear Systems
当线性系统中的 M 是一个很大的矩阵,又不特殊时,用高斯消元太慢了并且太占用空间。这时就需要一个更高效的方法:迭代法再次上线。我们先猜一个初始值 v,通过计算 Mv 和 b 比较,修改 v 来一步步逼近真实解。
可选的迭代方法有很多,如 Krylov Subspace Method(krylov 子空间算法),conjugate gradients(共轭梯度法),GMRes(广义最小残差法)。
学一下共轭梯度法然后补充在这里
Nonlinear Systems
对于如下非线性形式的 ODEs:
使用隐式欧拉法得到迭代公式:
求解等同于在这样一个方程中寻找根:
,常用的计算方法有:二分法,牛顿法
Sample
我们考虑污染物在一维空间的传播问题。令 表示在 t 时间 x 位置处污染物的浓度。u 的变化用对流扩散方程来定义:
扩散速率,对流速度$ c= 0.5m/s$
当 时污染物的分布图像为:
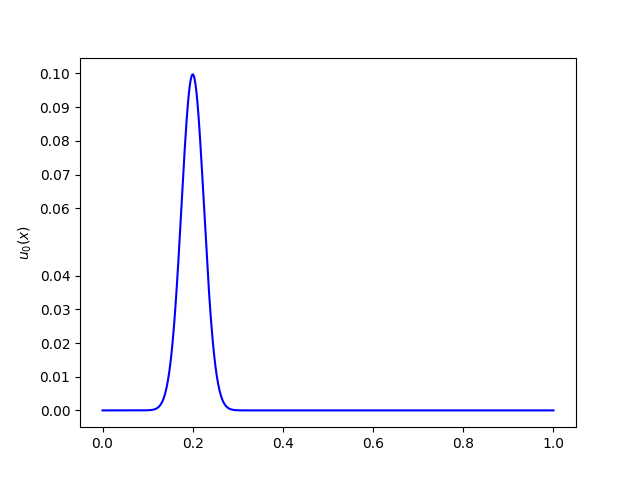
边界条件是第一类边界条件,在边界的时候始终等于 0。
我们采用有限差分法来计算污染物在 区间内随着时间从 0 变到 1 的变化。首先将偏导全部拆分近似为差分的形式:
然后用上面的方法转化为求 ODE 问题,代码如下:
1 | import numpy as np |
向后差分 + 显式欧拉 和 向后差分 + 二阶龙格库塔 方法得到的预测结果,颜色深度的变化代表时间的变化,绘制的图形为每隔 200ms 后在 x 上污染物的分布情况。:
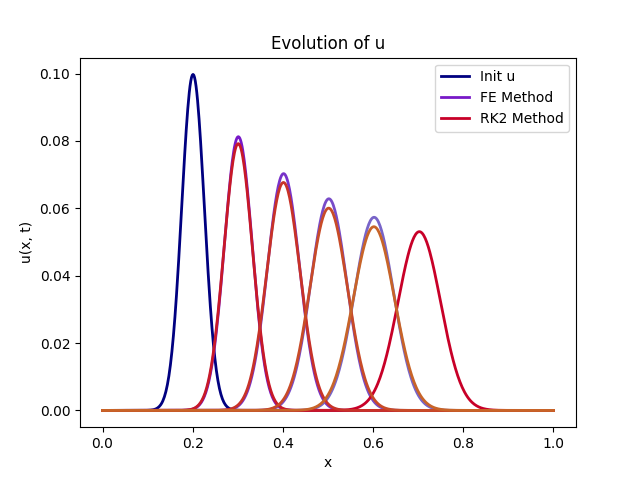
FE 误差为 8% 左右,如果我们使用 RK2 代替 FE 方法,误差减小到 0.8%。(用的黑盒函数测的误差,暂时还没复现解析解)
可以尝试修改 nSpace 和 nTime 观察效果。当切换方法为向前差分时,很难让结果稳定,对 nSpace 和 nTime 的要求很苛刻。