aix
正式开课了,这里仅是我的学习记录。
Module 1
introduction
Now, engineering and science applications may, as you know, have very different demands. Accuracy and reliability may be paramount(=very important). Large data sets might or might not be available. And we might need to use prior physical knowledge with new data-driven insights. We need to really combine physical modeling with what data can tell us.
The computational paradigm change over centuries:
- The experiment based model such as Newton’s Laws of Motion, we just observe carefully and distill the pricinple from thousands of experiments.
- The theory based model. It describe the physical world with a great deal of predictive power, accuary, and generalizability.
- The computational modeling and simulation. Based on the ideas that we use the computer to help us broaden the theory based model.
- The data-driven model. Using the machine learning method which gives us powerful ways of rebuilding models together with making predictions.
Module 2:常微分方程
they are equations that describe how things vary in time.
they are equation that describe how certain things vary in space.
they can be understood as a very deep limit of a recurrent neural network.
…
常微分方程的一般形式是
其中 u 代表状态向量(state vector) 而 t 代表时间。
计算机求解常微分方程
补充一下泰勒展开:
当函数 在点
处可导时,在点
的邻域内恒有:
如果我们从本质来看,可以更好的理解泰勒展开
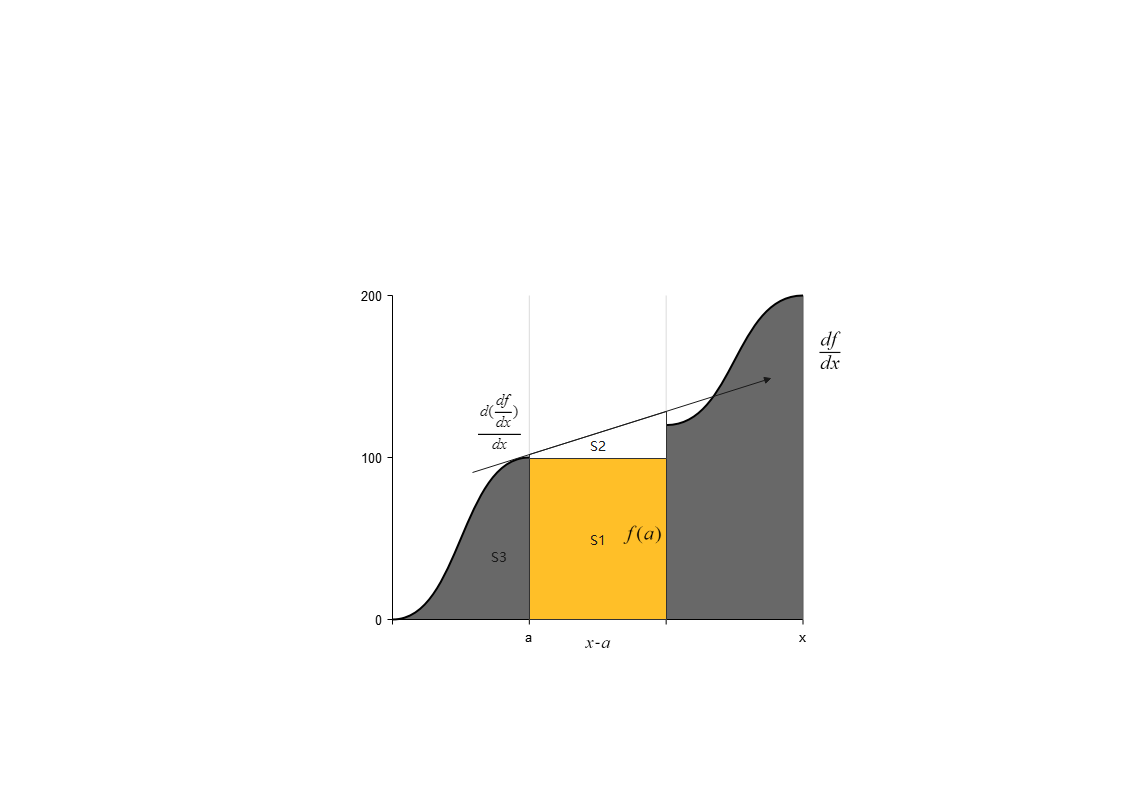
如上图,我们绘制了一个函数 的导数的图像,在这个
图像中,
的值可以用
和这个曲线围成的面积来计算。我们要求的
由三个部分组成:
- 矩形
- 近似面积三角形
矩形的面积很简单,为长乘宽 , 我们取的三角形为图中
点导数与
构成的区域, 那么三角形的面积就是
这就是一个二阶的泰勒展开式,如果我们借助3阶甚至更高阶导数来进一步求面积,就会使结果更加的精确,就有了上面的泰勒展开式的形式。
显式欧拉法(Forward-Euler)
显示欧拉法的核心是用 来代替
, 这样在一阶泰勒展开式就可以用我们已知的量来计算未知的
的值。为了保证计算更加的精确,同时我们将从
到
分成若干个
, 我们通过步步迭代来求得最终的估计值。迭代的函数如下:
其中 为我们的估计值,而
就是当前累计迭代的
值,由于我们忽略掉了泰勒展开二阶以后的所有量,所以我们的这个方法只有一阶的精度。
隐式欧拉法(Backward-Euler)
和显示欧拉大部分相同,但有些微不同。不同就在于隐式欧拉法选择用 代替
, 这样如果对
在
处展开,就能得到一个包含未知数的方程的递推公式。
隐式欧拉也等价于找上述方程的解,如果这个解有解,那么自然近似值也有解,即隐式欧拉可以更加好的确保稳定性,这对于考察一些系统的长期行为有帮助(我们会在后面的代码中说明这一点)
龙格库塔法(Runge-Kutta)
龙格库塔方法是一种高阶的方法,注意这里的高阶并不意味着任何时候它更加精确,只是它在我们减小步长的时候更误差会降低的更小。实际上,以四阶龙格库塔法为例,当步长选的比较大的时候,它的误差甚至比显式欧拉法还大。(我们会在后面的代码中观察到这一现象)
下面介绍 RK4(4阶龙格库塔)方法,迭代公式如下:
以4阶龙格库塔方法为例,当我们减半,误差的值将会变为原来的 1/16,同样的低阶方法(如显示欧拉)只能将误差变为原来的 1/2。
代码
多数无益,我们用几个例子来比较一下这些方法
FE vs BE
1 | # 显式欧拉和隐式欧拉的对比 |
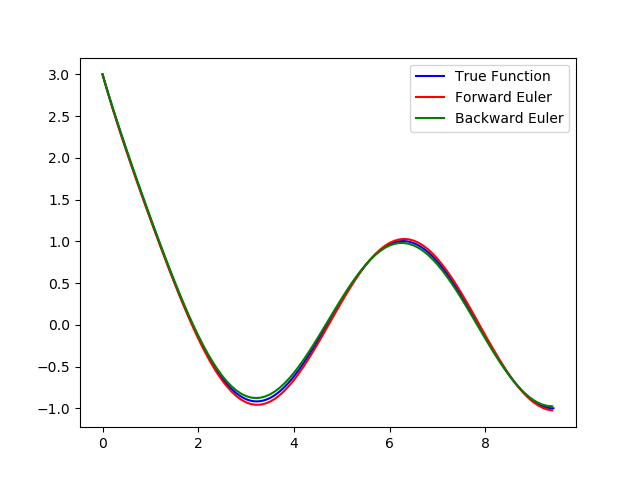
我们前面提到了一般来说,隐式欧拉更加的精确并且稳定(但有例外,尤其是原函数是线性函数的时候,显式欧拉更加精确)。什么是稳定性呢,就是当函数变化的时候,我们的估值计算误差不会发生很大的浮动。
上面的代码对 cos 函数做了一个小小的修改,以便于稳定性的比较,当 llam 很小的时候(如代码中),我们看到如下图:
当我们将 llam 调到 100 的时候,就会发现图像变成了下面的样子:
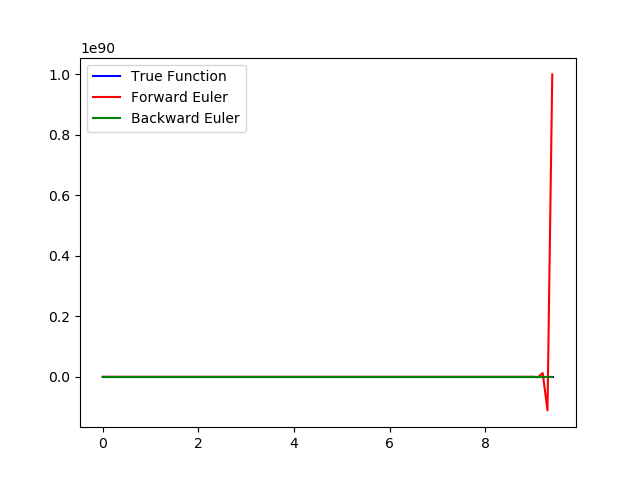
观察误差 Error of Forward Euler: 1.183439944385943e+88; Error of Backward Euler: 0.9107412532059388 明显,显式欧拉法的不稳定性弊端就凸显出来了。
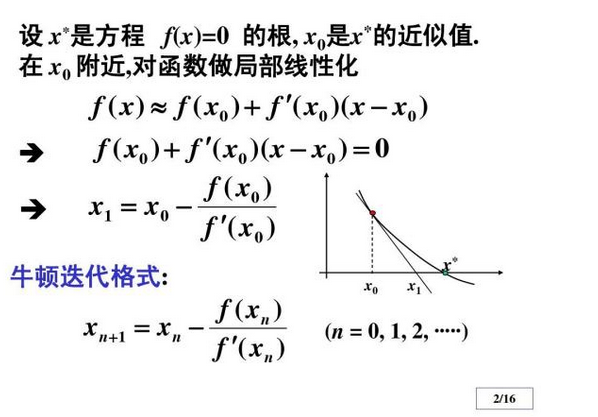
计算隐式欧拉法的根的时候采用的牛顿法估计根,方法的描述如下图(懒得打了网上找了张图)
FE vs RK4
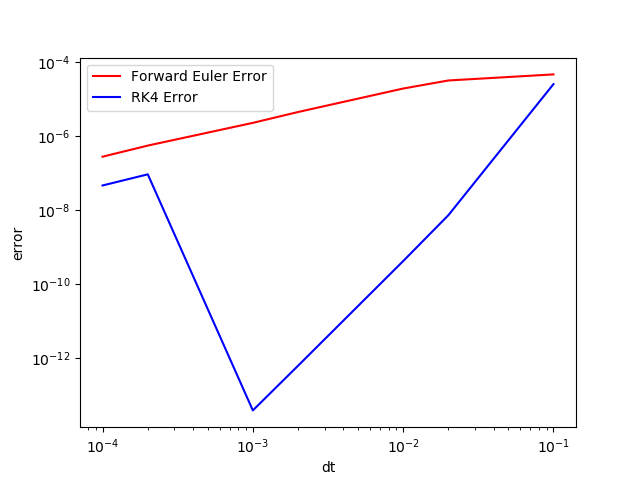
RK4 也并非一直都比 FE 更加的精确,看下面的这个例子:
我们设计下面一个 ODE:
令$ u(t)=e^{-\lambda t} \lambda$就可以比较 FE 和 RK4 方法的误差之处,有了真实函数方便我们计算误差,码来
1 | import math |
当我们取 时
当我们取 时
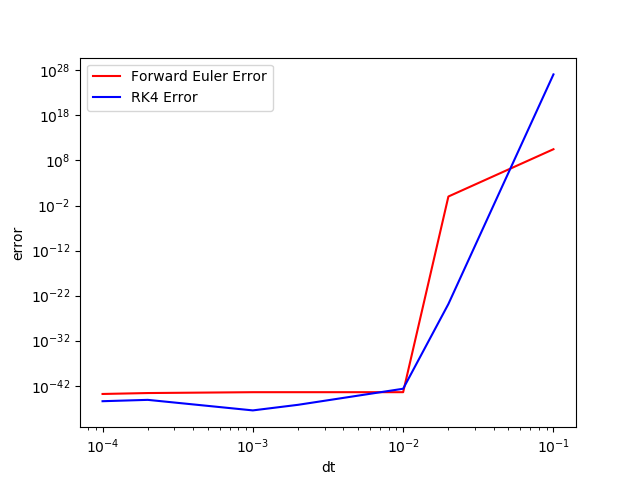
我们可以明显的感受到,并非高阶方法就能带来更小的误差,高阶只代表随着计算迭代次数增加,误差收敛的快。但这同时也要求有一个很好的 的选择。通常在对精度要求不高的计算中,我们都可以选择 FE 来解决。
(ps: 实际运算的时候 matlab 和 python 结果有些不同,matlab 更加精确一些,图像看起来也更好看。但图像变换的趋势和结论是一样的)